
Achieving Precise Synchronous Control of Multiple Screw Jacks
2025-10-17 16:48:07
Click:
“
In various industrial and engineering applications, such as large - scale stage setups, heavy - duty material handling systems, and precision manufacturing equipment
”
Abstract
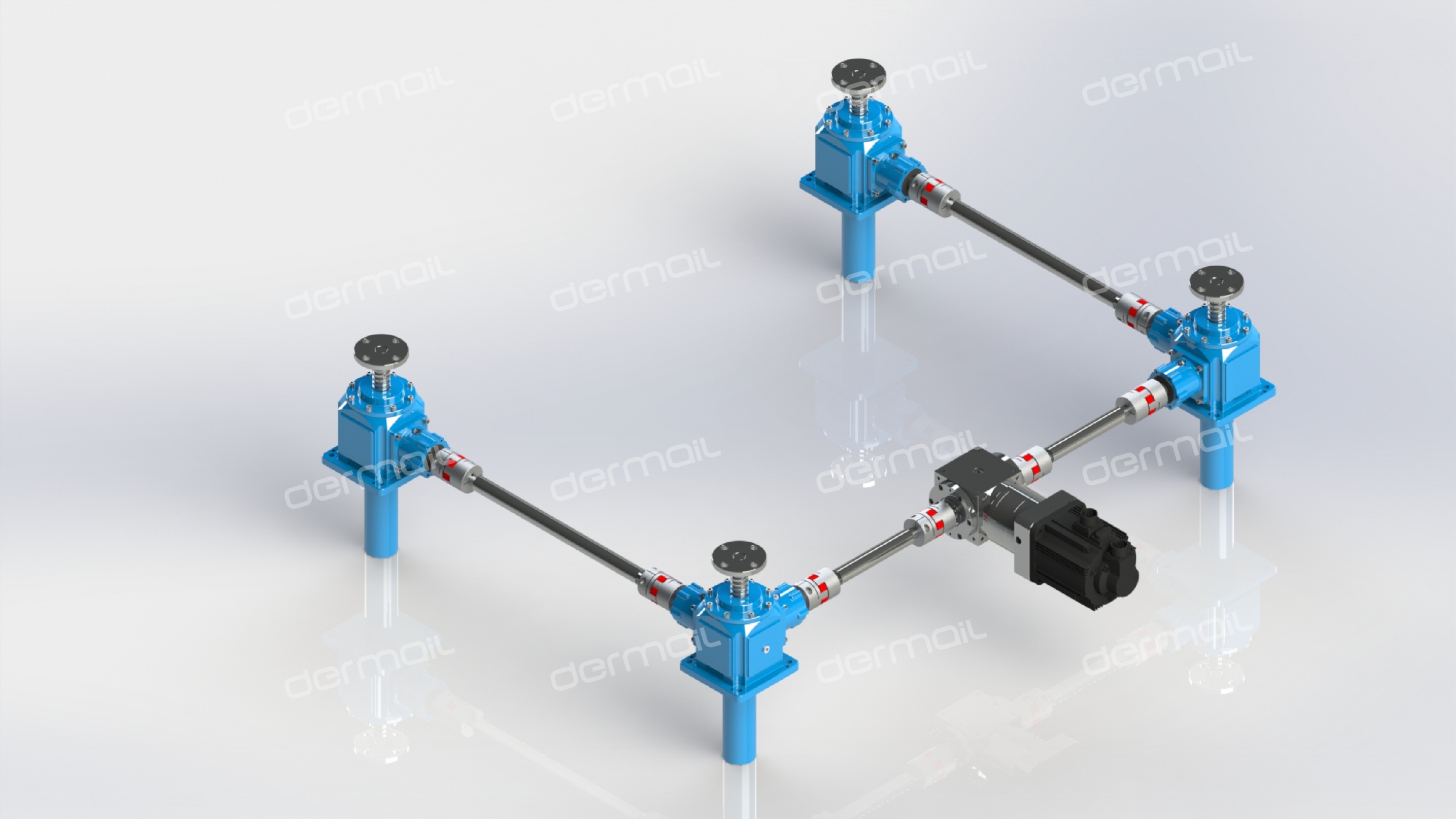
In various industrial and engineering applications, such as large - scale stage setups, heavy - duty material handling systems, and precision manufacturing equipment, the precise synchronous control of multiple screw jacks is of utmost importance. Screw jacks, known for their high load - bearing capacity and precise linear motion, require effective synchronization strategies to avoid issues like uneven lifting, structural stress, and reduced operational accuracy. This article delves into the key aspects of achieving precise synchronous control for multiple screw jacks.
1. Mechanical Design Considerations
1.1 Geometric Alignment
The initial step in ensuring synchronous operation is the precise geometric alignment of the dermail screw jacks. Each screw jack should be installed in a vertical position with minimal deviation. Misalignment can lead to uneven force distribution among the jacks, causing one or more to bear excessive loads while others remain underutilized. For example, in a large - scale stage lifting system, a misalignment of more than 0.5 degrees in the vertical orientation of a screw jack can result in a significant height difference between different sections of the stage over time.
To achieve accurate alignment, laser alignment tools can be used. These tools project a laser beam along the intended vertical axis, and the position of each screw jack is adjusted until the laser beam passes through a predefined target on the jack. This process is repeated for all screw jacks in the system to ensure uniform vertical alignment.
1.2 Coupling and Linkage
Coupling the screw jacks together is another crucial mechanical design aspect. Rigid couplings, such as flange couplings or sleeve couplings, can be used to connect the output shafts of adjacent screw jacks. This ensures that the rotational motion is transferred uniformly from one jack to another. However, rigid couplings may not be suitable for systems with significant thermal expansion or misalignment tolerance requirements.
In such cases, flexible couplings like elastomeric or universal joints can be employed. These couplings can accommodate small amounts of misalignment and thermal expansion while still transmitting the rotational motion effectively. For example, in a material handling system where the screw jacks are subject to temperature variations due to environmental conditions, elastomeric couplings can prevent excessive stress on the screw jacks and maintain synchronous operation.
1.3 Load Distribution
Equal load distribution among the multiple screw jacks is essential for precise synchronization. This can be achieved by using load - sharing devices, such as load cells or spring - loaded mechanisms. Load cells are installed between the load and the screw jacks to measure the force exerted by each jack. Based on the load cell readings, the control system can adjust the input to each screw jack to ensure an even distribution of the load.
Spring - loaded mechanisms, on the other hand, use springs to balance the load among the screw jacks. As the load on one jack increases, the spring compresses, transferring some of the load to adjacent jacks. This self - adjusting mechanism helps in maintaining synchronous operation, especially in systems with variable loads.
2. Sensor Technology for Feedback
2.1 Linear Position Sensors
Linear position sensors are vital for providing real - time feedback on the displacement of each screw jack. Magnetostrictive linear position sensors are a popular choice due to their high accuracy (up to ±0.01 mm) and long - term stability. These sensors work by measuring the time it takes for a magnetic pulse to travel along a waveguide inside the sensor, which is directly proportional to the linear displacement.
In a precision manufacturing equipment setup, magnetostrictive sensors can be installed on each screw jack to continuously monitor its position. The sensor data is then transmitted to the control system, which compares the actual positions of all screw jacks and makes necessary adjustments to achieve synchronization.
2.2 Rotary Encoders
Rotary encoders can also be used in conjunction with screw jacks. These devices are mounted on the input shaft of the screw jack and measure the rotational speed and position of the shaft. By knowing the pitch of the screw jack, the linear displacement can be calculated from the rotational data provided by the encoder.
Optical rotary encoders offer high resolution (up to 10,000 pulses per revolution) and are suitable for applications requiring precise control. The encoder signals are fed into the control system, which uses them to synchronize the rotational motion of all screw jacks, ensuring that they lift or lower the load at the same rate.
3. Control System Strategies
3.1 Master - Slave Control
The master - slave control strategy is a common approach for synchronizing multiple screw jacks. In this system, one screw jack is designated as the master, and the others are set as slaves. The master screw jack is controlled based on a reference input, such as a desired position or speed profile. The slave screw jacks then follow the motion of the master by receiving feedback from sensors and adjusting their input accordingly.
For example, in a large - scale stage lifting application, the master screw jack can be programmed to lift the stage at a specific rate. The slave screw jacks use position sensors to measure their own displacement and compare it with the master's position. If there is a deviation, the control system adjusts the input to the slave screw jacks to bring them back in sync with the master.
3.2 Cross - Coupling Control
Cross - coupling control is a more advanced strategy that takes into account the interactions between multiple screw jacks. Instead of treating each screw jack as an independent entity, cross - coupling control considers the relative positions and velocities of all screw jacks in the system.
This approach uses a control algorithm that calculates the coupling forces between the screw jacks based on their position errors. For instance, if one screw jack is moving faster than the others, the cross - coupling control algorithm will generate a corrective force to slow it down and bring it in line with the rest of the system. This method is particularly effective in systems with high precision requirements and complex load distributions.
3.3 Model Predictive Control (MPC)
Model predictive control is a predictive control strategy that uses a mathematical model of the system to predict future states and make optimal control decisions. In the context of multiple screw jacks, MPC takes into account the dynamics of the screw jacks, the load characteristics, and the desired synchronization objectives.
The MPC algorithm predicts the future positions of all screw jacks based on the current state and the control inputs. It then calculates the optimal control inputs for each screw jack to minimize the synchronization error over a prediction horizon. This approach is useful for systems with time - varying loads and disturbances, as it can proactively adjust the control inputs to maintain precise synchronization.
4. Communication and Networking
4.1 Wired Communication
Wired communication protocols, such as Ethernet/IP or Profibus, are commonly used for connecting the screw jacks, sensors, and the control system. These protocols offer high - speed data transfer and reliable communication, which is essential for real - time synchronization.
In a large - scale industrial setup, Ethernet/IP can be used to create a network where each screw jack is connected to a central control unit. The sensors on the screw jacks transmit their data to the control unit via the Ethernet/IP network, and the control unit sends control signals back to the screw jacks to adjust their operation. This wired communication ensures low latency and high data integrity, enabling precise synchronization.
4.2 Wireless Communication (Optional)
Wireless communication technologies, such as Wi - Fi or Zigbee, can also be considered for systems where wired connections are difficult to implement. However, wireless communication may introduce additional challenges, such as signal interference and latency.
To mitigate these issues, advanced wireless protocols with error - correction mechanisms and low - latency features can be used. For example, in a remote or mobile material handling system, wireless communication can be used to connect the screw jacks to a portable control device, allowing for flexible operation while still maintaining a certain level of synchronization.
Conclusion
Achieving precise synchronous control of multiple screw jacks requires a comprehensive approach that encompasses mechanical design, sensor technology, control system strategies, and communication networking. By carefully considering geometric alignment, load distribution, and the use of appropriate couplings, along with implementing advanced sensor feedback and control algorithms, industrial systems can ensure multiple screw jacks operate in perfect harmony. This not only enhances the performance and reliability of the systems but also prevents potential damage and safety hazards associated with asynchronous operation.
As technology continues to advance, new methods and tools for screw jack synchronization will emerge, further improving the precision and efficiency of industrial processes that rely on these versatile mechanical devices.








Tel:+86-317-7369999
E-mail: demai@demai.org
Mobile:+86-18653450543 (Wechat)
Address:No. 6, Haihe Road, economic development zone, Wuqiao County, Cangzhou City, Hebei Province

点击右上角
分享给朋友吧
Copyright ©2023 All Rights Reserved Hebei Demai Transmission Machinery Co.,Ltd.
Copyright ©2025 All Rights Reserved Hebei Demai Transmission Machinery Co.,Ltd.
