
Ensuring Synchronization in Multi-Unit Screw Jack Linkage Systems
2025-09-06 17:14:16
Click:
“
Screw jack systems are widely used in industrial applications requiring precise vertical motion control, such as heavy-duty lifting platforms, automotive assembly lines, and solar panel tracking systems.
”
Abstract
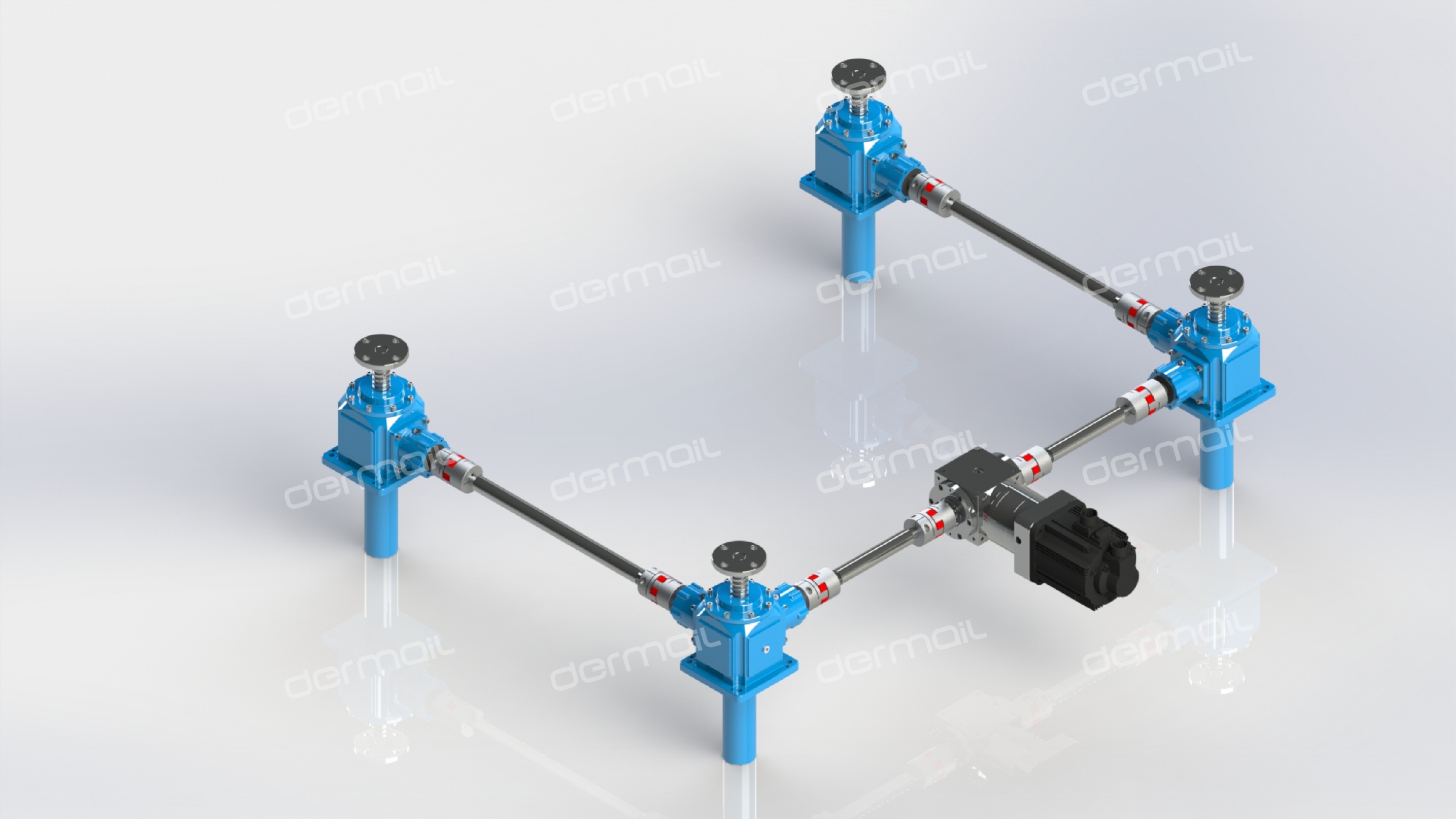
Dermail Transmission screw jack systems are widely used in industrial applications requiring precise vertical motion control, such as heavy-duty lifting platforms, automotive assembly lines, and solar panel tracking systems. When multiple screw jacks operate in tandem, achieving and maintaining synchronization becomes critical for system stability, load distribution, and operational safety. This article explores comprehensive strategies for ensuring synchronization in multi-unit screw jack linkage systems, covering mechanical design optimization, advanced control methodologies, installation best practices, and maintenance protocols.
1. Introduction
The synchronization of multiple screw jacks presents unique challenges due to factors including manufacturing tolerances, mechanical backlash, load distribution variations, and environmental influences. Even minor synchronization errors can lead to uneven load sharing, increased mechanical stress, platform tilting, or operational failures in precision applications. Effective synchronization requires a holistic approach integrating hardware selection, control system design, and operational management.
2. Mechanical Design Optimization
2.1 High-Precision Transmission Components
- Ball Screw Selection: Opt for precision-ground ball screws with grade C3 or higher accuracy (lead error ≤0.015mm/300mm) to minimize axial play. Double-nut preloading can eliminate backlash while maintaining smooth operation.
- Worm Gear Precision: Choose worm gear sets with AGMA class 8 or ISO class 6 precision ratings, featuring controlled tooth profile deviations (≤0.015mm) and optimized contact patterns through grinding processes.
- Rigid Couplings: Implement servo-grade couplings like bellow or disc types with torsional stiffness >100,000 Nm/rad to maintain angular alignment between shafts.
2.2 Mechanical Synchronization Mechanisms
- Synchronizing Shafts: Connect multiple screw jacks via a rigid transmission shaft with universal joints, ensuring angular misalignment compensation while maintaining torsional rigidity. For example, a 10m-long shaft system demonstrated <0.05mm height difference across eight screw jacks in automotive panel pressing applications.
- Symmetrical Layout Design: Arrange screw jacks in geometrically balanced configurations (e.g., rectangular or radial patterns) to equalize load distribution and minimize differential deflection.
3. Advanced Control Strategies
3.1 Centralized Drive Systems
- Single Motor Configuration: Employ a high-power servo motor driving all screw jacks through a single gearbox or synchronized belt/chain system. This eliminates motor speed variations as a synchronization error source, as demonstrated in a 50-ton aircraft maintenance platform achieving ±0.1mm synchronization accuracy.
- Motor Selection Criteria: Calculate total torque requirements considering mechanical efficiency (typically 60-80% for worm gear systems) and include 30% safety margin for dynamic loads.
3.2 Closed-Loop Control Implementation
- High-Resolution Encoders: Equip each screw jack with absolute encoders (≥17-bit resolution) for precise position feedback. Magnetic linear encoders with 1μm resolution have proven effective in solar tracker applications.
- Real-Time Compensation: Implement PID control algorithms with adaptive tuning to dynamically adjust motor outputs based on position error signals. A typical control cycle of 2-5ms enables rapid correction of synchronization deviations.
3.3 Synchronization Control Architectures
- Master-Slave Configuration: Designate one screw jack as master with others following its position profile. This approach suits applications with predictable load distributions, such as conveyor system height adjustment.
- Cross-Coupled Control: Develop advanced algorithms comparing position errors between all axes and generating compensatory commands. This method reduced synchronization errors by 60% in a 20-unit heavy-duty lifting platform test.
4. Installation and Commissioning Best Practices
4.1 Precision Installation Techniques
- Alignment Tolerances: Maintain screw jack vertical alignment within 0.05mm/m using laser alignment tools, and ensure coupling axial misalignment <0.02mm to prevent binding.
- Leveling Procedures: Use electronic leveling systems with 0.001° resolution to adjust platform support points, minimizing initial height differences.
4.2 Commissioning Protocols
- Load Testing: Conduct progressive load tests from 25% to 125% of rated capacity while monitoring synchronization performance. Implement automatic calibration routines that adjust control parameters based on load-induced deflection patterns.
- Environmental Compensation: Incorporate temperature sensors to account for thermal expansion effects (typically 11-17μm/m/°C for steel components), with control system algorithms compensating for dimensional changes during operation.
5. Maintenance and Performance Monitoring
5.1 Predictive Maintenance Strategies
- Vibration Analysis: Deploy wireless vibration sensors to detect early signs of bearing wear or gear misalignment, with FFT analysis identifying frequency components corresponding to specific failure modes.
- Lubrication Management: Implement automated lubrication systems with programmable intervals based on operational hours, using synthetic lubricants rated for -40°C to +120°C to maintain consistent friction coefficients.
5.2 Continuous Performance Validation
- Synchronization Monitoring: Integrate IoT sensors to continuously track position differences between screw jacks, triggering alerts when deviations exceed predefined thresholds (typically ±0.2mm for precision applications).
- Software Updates: Regularly update control system firmware to incorporate improved synchronization algorithms and diagnostic capabilities developed through operational data analysis.
6. Case Study: Automotive Body-in-White Assembly Line
A leading automotive manufacturer implemented a 16-unit screw jack synchronization system for flexible body assembly stations. Key solutions included:
- Custom-designed ball screw jacks with 0.01mm/m lead accuracy
- Real-time Ethernet-based control network with 1ms communication cycle
- Adaptive cross-coupled control algorithm compensating for dynamic load changes
- The system achieved ±0.08mm synchronization accuracy across 8m stroke at 0.5m/s speed, reducing body panel misalignment by 75% compared to previous solutions.
7. Conclusion
Achieving reliable synchronization in multi-unit screw jack systems requires meticulous attention to mechanical precision, advanced control technologies, and rigorous operational protocols. By integrating high-accuracy components, implementing real-time compensation algorithms, and establishing comprehensive maintenance regimes, modern screw jack systems can consistently meet the stringent synchronization requirements of demanding industrial applications. Future developments in smart sensors, machine learning-based control, and digital twin technologies promise even greater synchronization capabilities for next-generation motion control systems.








Tel:+86-317-7369999
E-mail: demai@demai.org
Mobile:+86-18653450543 (Wechat)
Address:No. 6, Haihe Road, economic development zone, Wuqiao County, Cangzhou City, Hebei Province

点击右上角
分享给朋友吧
Copyright ©2023 All Rights Reserved Hebei Demai Transmission Machinery Co.,Ltd.
Copyright ©2025 All Rights Reserved Hebei Demai Transmission Machinery Co.,Ltd.
