
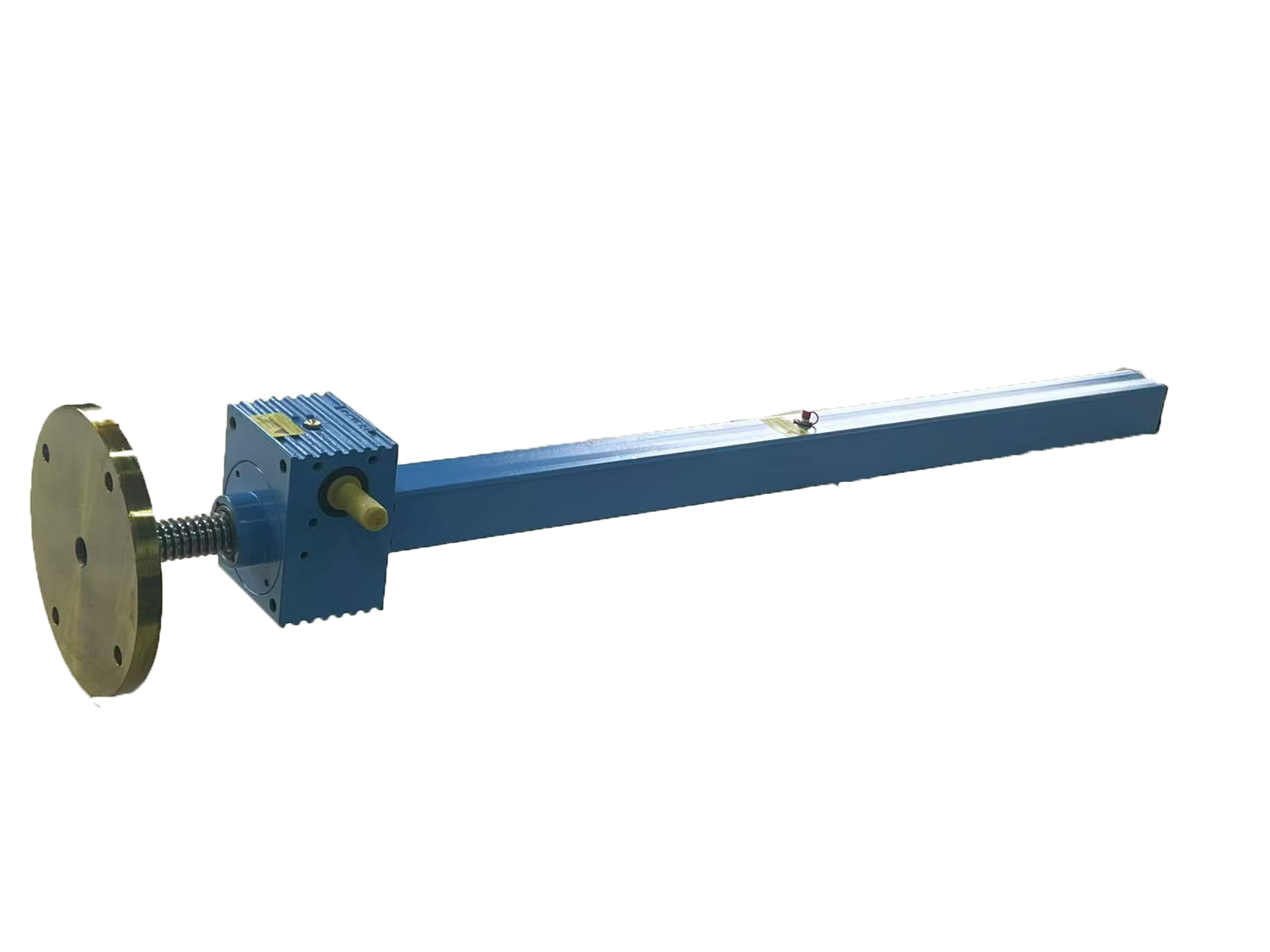
How Lead Screw Pitch Affects Screw Jack Performance
2026-06-03 09:04:16
Click:
“
It is the single most consequential parameter shaping the behavior of a screw jack, dictating a cascade of performance trade-offs across speed, force, precision, and longevity.
”
The pitch of a lead screw — the axial distance the nut travels per one revolution — is far more than a geometric footnote. It is the single most consequential parameter shaping the behavior of a screw jack, dictating a cascade of performance trade-offs across speed, force, precision, and longevity.
1. Lifting Speed: The Most Direct Relationship
Speed is pitch multiplied by rotational speed, divided by the worm gear ratio:
Linear speed = (Motor RPM × Pitch) / Worm Gear Ratio
This means pitch acts as a linear multiplier. A 12 mm pitch screw moves exactly twice as far per revolution as a 6 mm pitch screw under identical motor and gearbox conditions. In practice, SWL series jacks commonly offer pitches of 6 mm, 12 mm, 15 mm, and 20 mm — doubling the pitch effectively doubles the travel speed without changing anything else.
Rule of thumb: Large-pitch screws are chosen when cycle time matters. Small-pitch screws dominate when precision matters more than throughput.
2. Thrust Capacity: The Inverse Trade-Off
Here lies the fundamental compromise: the larger the pitch, the lower the axial thrust for a given input torque. This is not a suggestion — it is physics. The mechanical advantage of a screw is inversely proportional to its pitch. A coarse-pitch screw converts rotational force into linear motion less efficiently than a fine-pitch screw.
- Heavy load (20T+): Small pitch + slow gear ratio (M) — maximizes thrust, minimizes shock loading
- Medium load (5–15T): Standard pitch + normal ratio (P) — balances speed and stability
- Light load, high efficiency: Large pitch + fast ratio — prioritizes speed over force
Never mismatch speed and load. Using a high-speed setting on a heavy load invites motor overload, accelerated worm gear wear, screw deflection, and in the worst case — catastrophic load drop.
3. Positioning Accuracy: Pitch as the Precision Gatekeeper
Pitch error is the primary culprit behind positioning inaccuracy in screw jacks. Every micron of cumulative pitch error translates directly into positioning error.
- Even high-precision ball screws exhibit pitch cumulative errors exceeding 0.01 mm/m.
- When pitch error exceeds 5 μm, repeat positioning accuracy can degrade by 30% — as demonstrated in optical inspection equipment cases.
- For positioning requirements ≤ 0.1 mm, a pitch no larger than 5 mm is strongly recommended; larger pitches require higher-resolution encoders to compensate.
Trapezoidal screw jacks are particularly sensitive: pitch machining errors cause cumulative stroke errors in unidirectional travel, while backlash from the worm gear pair introduces dead zones during direction reversal. The result is a positioning accuracy that depends on pitch quality, worm gear clearance, and bearing preload — all intertwined.
4. Vibration and Smoothness of Operation
Non-uniform pitch — where the distance between adjacent threads varies even slightly — creates periodic jolts during travel. This manifests as visible vibration and audible noise.
Key thresholds from field data:
- Pitch cumulative error exceeding 0.02 mm/m requires screw replacement.
- Worm gear indexing deviation beyond ±5 arc minutes causes uneven load distribution and vibration.
- Radial runout exceeding 0.02 mm/m raises screw temperature by 8–10°C and generates 0.01 mm of additional backlash per 1,000 hours of operation.
A uniformly machined pitch is not a luxury — it is the foundation of smooth, quiet operation.
5. Heat Generation and Service Life
Pitch indirectly governs thermal behavior. A large-pitch screw running at high speed under heavy load generates more friction heat, accelerating wear. Conversely, a small-pitch screw under the same load runs cooler but demands higher motor torque, which can overload the drive if undersized.
Preload adjustment — a common method to eliminate backlash — is a double-edged sword: reducing preload torque by just 15% can cause 1.2 mm of axial play, while increasing preload by 10% raises temperature rise rate by 35%, accelerating raceway fatigue. The recommended practice is the 'three-point measurement method': verify preload torque at the screw's midpoint and both ends, ensuring variation does not exceed 5%.
Over a full lifecycle, wear follows three phases:
- Break-in (first 200 hours): Gap shrinks by 0.5–1 μm
- Stable (3,000–5,000 hours): ~0.3 μm wear per month
- Accelerated (8,000+ hours): Wear jumps to ~2 μm per month
Pitch selection at the design stage directly influences which phase dominates the operational window.
6. Diameter-Pitch Coordination
Pitch does not exist in isolation. As load increases, screw diameter must grow, and pitch must be co-optimized. A practical rule observed across SWL models:
Inner diameter ≈ Outer diameter − Pitch
For example, an SWL5 jack with a 40 mm outer diameter and 7 mm pitch yields a 33 mm inner diameter — with 3.5 mm wall thickness on each side. This geometric relationship ensures adequate structural strength while accommodating the chosen pitch.
Bottom Line
Pitch is the axis around which all screw jack performance revolves. It simultaneously governs how fast you move, how much you can lift, how precisely you stop, how quietly you run, and how long the machine lasts. There is no universally optimal pitch — only the right pitch for the right application. Choose it deliberately, and the entire system performs. Choose it carelessly, and every other component pays the price.








Tel:+86-317-7369999
E-mail: demai@demai.org
Mobile:+86-18653450543 (Wechat)
Address:No. 6, Haihe Road, economic development zone, Wuqiao County, Cangzhou City, Hebei Province

点击右上角
分享给朋友吧
Copyright ©2023 All Rights Reserved Hebei Demai Transmission Machinery Co.,Ltd.
Copyright ©2025 All Rights Reserved Hebei Demai Transmission Machinery Co.,Ltd.
